自己紹介・研究目的
令和7年度修了/ ■SPRING事業 採択学生紹介
数理・ヒューマンシステム科学専攻
令和7年度 大学院入学
RAZZAQ Asad
ラザク アサド
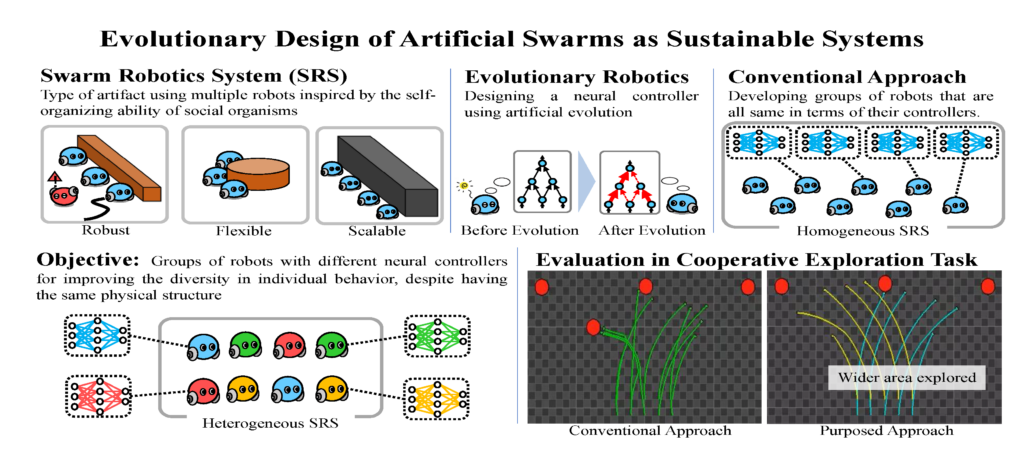
Evolutionary Design of Artificial Swarms as Sustainable Systems (人工スワームの進化的設計による持続可能なシステム)
Greetings, it’s great to have you here! My name is Asad RAZZAQ from Pakistan, a first-year Ph.D. student in the Advanced Mathematics and Human Mechanisms department, specifically working in the Control Systems Engineering Laboratory, at the University of Toyama. My research interests revolve around the fascinating field of swarm intelligence and evolutionary robotics. I am constantly working towards creating innovative, adaptive, and intelligent systems that can solve real-world problems.
Nature never ceases to amaze us with its incredible examples of collective behavior in social insects, fish, and birds. Taking inspiration from such superorganisms, my research aims to harness the power of swarm intelligence to build intelligent systems that can learn from and replicate such natural examples. One fascinating application of this research is in Swarm Robotics Systems (SRS), which utilizes multiple robots working in a self-organizing and robust manner to accomplish complex tasks.
In the evolutionary robotics approach, robot controllers are represented by neural networks. The same neural controller is implemented on all of the robots in conventional SRS. By focusing on simplicity as another key to underly the system properties, this study aims to achieve task performance by creating a heterogeneous SRS using multiple neural controllers. The difference between robots is the synaptic weights of the neural controllers for improving the diversity in individual behavior, despite having the same physical structure. I am excited to continue my research and contribute towards the development of more robust, flexible, and scalable systems that can transform the way we live and work, leveraging the power of AI, swarm intelligence, and evolutionary robotics.(旧フェローシップ事業採択学生)
Nature never ceases to amaze us with its incredible examples of collective behavior in social insects, fish, and birds. Taking inspiration from such superorganisms, my research aims to harness the power of swarm intelligence to build intelligent systems that can learn from and replicate such natural examples. One fascinating application of this research is in Swarm Robotics Systems (SRS), which utilizes multiple robots working in a self-organizing and robust manner to accomplish complex tasks.
In the evolutionary robotics approach, robot controllers are represented by neural networks. The same neural controller is implemented on all of the robots in conventional SRS. By focusing on simplicity as another key to underly the system properties, this study aims to achieve task performance by creating a heterogeneous SRS using multiple neural controllers. The difference between robots is the synaptic weights of the neural controllers for improving the diversity in individual behavior, despite having the same physical structure. I am excited to continue my research and contribute towards the development of more robust, flexible, and scalable systems that can transform the way we live and work, leveraging the power of AI, swarm intelligence, and evolutionary robotics.(旧フェローシップ事業採択学生)